

 جدید
جدیداسکنر سه بعدی چیست؟ از کاربردها و تکنولوژیهای آن چه میدانید؟
مقدمه
با فراگیر شدن و پیشرفت تکنولوژیهای ساخت افزایشی، اهمیت و توسعهی تکنولوژیهای اسکن سه بعدی و به تبع آن اسکنرهای سه بعدی افزایش چشمگیری پیدا کرده است. امروزه میتوان انواع اسکنرهای سه بعدی را در بازار دید؛ از اسکنر سه بعدی خانگی و ارزان تا اسکنرهای صنعتی و گران… در این مقاله به بررسی انواع اسکنرهای سه بعدی که امروزه رواج دارد میپردازیم ...
اسکن سه بعدی: مقدمهی یک بازآفرینی
اسکنر سه بعدی وسیلهای است که اشیاء و محیط دنیای واقعی را آنالیز میکند و دادههایی از شکل و بافت آنها را به عنوان خروجی میدهد. این دادهها میتوانند برای مدلسازی سه بعدی دیجیتال و حتی فیزیکی آن شی یا محیط استفاده شوند.
اسکنرهای سه بعدی از زیرتکنولوژیهای متفاوتی استفاده میکنند. هرکدام از این تکنولوژیها دارای مزایا و معایب مختص به خود هستند. در نتیجه انتخاب هر کدام از آنها باید متناسب با نیازها و محدودیتها انجام شود. به عنوان نمونه اسکنرهای سه بعدی اپتیک در اسکن سه بعدی اجسام براق، بازتابنده و شفاف دارای ضعف هستند.
اسکنرهای سه بعدی ابزارهای اندازهگیری ابعاد در سه بعد هستند که برای ثبت اجسام ملموس در دنیای واقعی استفاده میشوند تا بتوان آنها را در دنیای دیجیتال آنالیز و بازطراحی کرد.
اگر تمایل دارید در مورد مبانی پرینت سه بعدی یک مقالهی جامع بخوانید، مطالعه نوشتهی “پرینت سه بعدی: تکنیک ها و تکنولوژی ها” را پیشنهاد میکنیم.
کاربرد اسکنر سه بعدی بازهی وسیعی را شامل میشود. از مهندسی معکوس و دندانپزشکی تا صنایع سینما و بازیسازی! در ادامه به طور مفصل به کاربرد اسکنر سه بعدی در حوزههای مختلف خواهیم پرداخت.
اهداف اسکن سه بعدی
اجسام معمولاً با دو هدف اسکن سه بعدی میشوند:
استخراج ابعاد برای تولید یک فایل CAD و استفاده از آن برای مهندسی معکوس یا نمونهسازی سریع برای آنالیز و مستندسازی ابعاد جسم.
این کار برای استفاده در Computer-Aided Inspection یا به اختصار CAI، آرشیوسازی دیجیتال و آنالیزهای Computer-Aided Engineering یا CAE انجام میشود.
نحوه عملکرد اسکنر سه بعدی
همیشه هدف از اسکن سه بعدی ساخت یک مدل سه بعدی است. این مدل سه بعدی از یک ابر نقاط تشکیل شده است که ابر نقاط موقعیت فضایی سطح مورد اسکن سه بعدی را نشان میدهد. این نقاط میتوانند برای استخراج شکل آن جسم استفاده شوند. برخی از اسکنرهای سه بعدی توانایی استخراج رنگ سطوح را هم دارند. در ابر نقاط ساخته شده توسط این اسکنرهای سه بعدی، رنگ هر نقطه از سطح هم در دادههای خروجی اسکنر سه بعدی لحاظ میشود.
در اغلب موارد برای به دست آوردن مدل سه بعدی سوژهی مورد اسکن سه بعدی، بیش از یک بار نیاز به اسکن سه بعدی آن قطعه است. متناسب با زیرتکنولوژی اسکن سه بعدی مورد استفاده، در برخی موارد تا دهها بار نیاز به پروسهی اسکن سه بعدی از زوایا و فواصل مختلف است. هرچند همهی این پروسههای انجام شده برای اسکن سه بعدی یک جسم خاص در نهایت باید در یک سیستم مرجع جمعآوری و بررسی شوند. به این پروسه Alignment یا Registration گفته میشود و خروجی حاصل از آن همان مدل سه بعدی جسم مورد نظر است.
تکنولوژیهای اسکنرهای سه بعدی
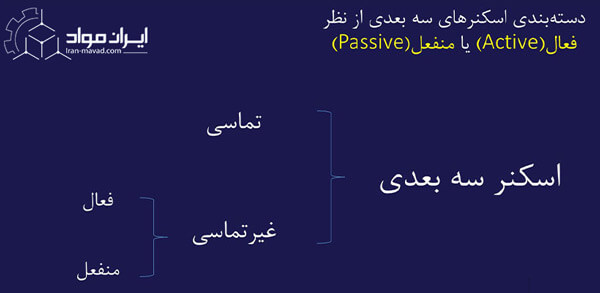
برای به دست آوردن مدل دیجیتالی از شکل یک جسم، بازهی گستردهای از تکنولوژیهای متفاوت وجود دارد. یکی از دستهبندیهای قابل قبول تقسیم اسکنرهای سه بعدی به دو شاخهی تماسی و غیرتماسی است. اسکنرهای سه بعدی غیرتماسی خود به دو دستهی اصلی فعال(Active) و منفعل(Passive) تقسیم میشوند. هرکدام از این زیردستهها هم خود به زیرتکنولوژیهای متفاوتی تقسیم میشوند. در ادامه به آنها خواهیم پرداخت.
۱. اسکنرهای سه بعدی تماسی (Contact)
اسکنرهای سه بعدی تماسی سطح جسم را با لمس فیزیکی آن کاوش میکنند. اسکنرهای سه بعدی تماسی از سه مکانیزم مختلف برای اسکن سه بعدی یک جسم استفاده میکنند:
- این سیستم از یک بازو صلب تشکیل شده است که انتهای آن بر روی یک ریل میلغزد. این دسته از اسکنرهای سه بعدی تماسی برای اسکن سه بعدی پروفیلهایی با سطح صاف و یا سطوحی با تحدب ساده مناسب هستند.
- یک بازوی صلب که از چند بند و سنسورهای دقیق زاویهای تشکیل شده است. موقعیت انتهای بازوی اسکنر سه بعدی با محاسبهی زاویهی هرکدام از مفصلها به دست میآید. این دسته از اسکنرهای سه بعدی برای اسکن سه بعدی درون منفذها و قسمتهایی از اجسام که راه دسترسی کمی دارد مناسب است.
- ترکیبی از دو گونهی اسکنر سه بعدی تماسی که به آنها اشاره شد. این گونه از اسکنر سه بعدی تماسی از یک بازوی بندبند که بر روی یک ریل میلغزد تشکیل شده است. این اسکنر سه بعدی تماسی برای اسکن سه بعدی اجسام بزرگ با حفرههای درونی و سطوح متداخل مناسب است.
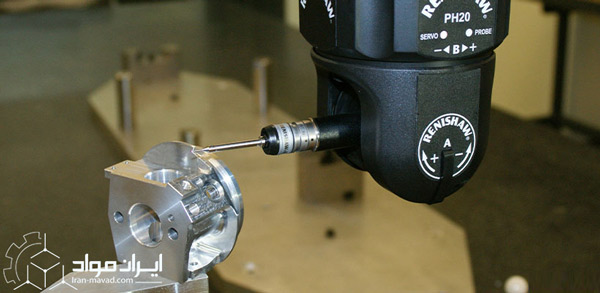
در مورد CMM
CMM که مخفف عبارت Coordinate Measuring Machine یک نمونه اسکنر سه بعدی تماسی است که اغلب در صنعت استفاده میشود و میتواند بسیار دقیق باشد. عیب اسکنر سه بعدی CMM این است که برای اسکن سه بعدی یک جسم باید با آن تماس داشته باشد. پس فرآیند اسکن سه بعدی یک جسم با CMM ممکن است موجب تغییر و یا حتی تخریب آن جسم شود.
این نکتهی ظریف میتواند بسیار حیاتی و مهم باشد. تصور کنید که بخواهید اشیاء حساسی همچون آثار باستانی را با یک اسکنر سه بعدی تماسی اسکن کنید! یک عیب دیگر CMM این است که در مقایسه با دیگر اسکنرهای سه بعدی دارای روندی آهسته است. جابهجایی فیزیکی یک بازو که در انتهای آن پراب(Probe) اسکنر سه بعدی CMM متصل است میتواند بسیار آهسته صورت گیرد. سریعترین اسکنرهای سه بعدی CMM میتوانند تنها صدها هرتز را به کار اندازند. برخلاف اسکنرهای سه بعدی تماسی، اسکنرهای سه بعدی اپتیک، همچون اسکنر سه بعدی لیزری، میتوانند از ۱۰ تا ۵۰۰ کیلوهرتز را به کار اندازند.
“پراب لمسی دستی” یا Hand Driven Touch Probe یک نمونهی دیگر از اسکنرهای سه بعدی تماسی است. این اسکنر سه بعدی اغلب برای استخراج نسخهی دیجیتالی مدلهای گلی در صنعت انیمیشن استفاده میشود.
۲. اسکنرهای سه بعدی غیرتماسی فعال (Non-Contact Active)
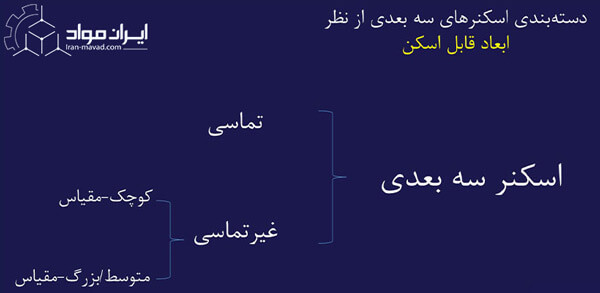
اسکنرهای غیرتماسی را هم میتوان از دیدگاه ابعاد اجسامی که اسکن سه بعدی میکنند به دو دستهی کلی اسکنرهای کوچک-مقیاس(Short Range) و اسکنرهای متوسط/بزرگ-مقیاس(Medium/Long Range) دستهبندی کرد. همانطور که از نام این دو دسته پیداست اولی به اسکنرهایی گفته میشود که توانایی اسکن اجسام کوچک را دارند و دومی به اسکنرهایی که توانایی اسکن اجسام متوسط/بزرگ را دارند.
اسکنرهای غیرتماسی را میتوان به دو دستهی فعال و غیرفعال تقسیم کرد. در این بخش به اسکنرهای سه بعدی غیرتماسی فعال میپردازیم و در ادامه نگاهی کوتاهی بر اسکنرهای سه بعدی غیرتماسی منفعل خواهیم داشت.
اسکنرهای سه بعدی فعال، برخی طیفهایی از اشعه را بر سطح اجسام و یا محیط میتابانند و سپس هندسهی آن جسم و یا محیط را به طور دیجیتال مدل میکنند. اغلب اسکنرهای سه بعدی فعال موجود در بازار، نور، ماوراصوت و اشعه ایکس را بر سطوح اجسام و یا محیط میتابانند.
۱.۲. زمان پرواز (Time of Flight)
اسکنر سه بعدی لیزری زمان پرواز، یک اسکنر سه بعدی فعال است که از لیزر برای موقعیت یابی نقاط روی سطح یک جسم استفاده میکند. در حقیقت قلب این اسکنر سه بعدی یک فاصلهیاب لیزری(Laser RangeFinder) زمان پرواز است. این نوع از فاصلهیاب لیزری در ابتدا یک پالس نوری را به سمت سطح جسم میتاباند و سپس با محاسبهی زمان رفت و برگشت پالس، فاصله را تا آن نقطه از سطح جسم محاسبه میکند. واضح است که از آنجایی که سرعت نور ثابت(در بستر این بحث میتوانیم آن را ثابت در نظر بگیریم) و مشخص است، با داشتن زمان رفت و برگشت نور میتوان فاصله طی شده توسط آن را به دست آورد!
میزان دقت یک اسکنر سه بعدی لیزری زمان پرواز به دقت آن در محاسبهی زمان رفت و برگشت نور بستگی دارد.
لزوم تغییر مداوم میدان دید در اسکنر سه بعدی زمان پرواز
فاصلهیاب لیزری در هر موقعیت دیدی که نسبت به جسم قرار میگیرد، تنها میتواند فاصلهی یک نقطه را تخمین بزند. بنابراین اسکنر سه بعدی لیزری زمان پرواز باید برای اسکن تمام نقاط روی سطح جسم، زاویهی دیدش را به طور مرتب تغییر دهد. البته زاویهی دید اسکنر سه بعدی لیزری زمان پرواز میتواند با تغییر زاویهی فاصلهیاب لیزری درون آن و یا با استفاده از آینههای چرخان هم تغییر کند. معمولاً هم در این گونه از اسکنرها از روش دوم استفاده میشود. به این خاطر که آینهها سبکتر هستند و به همین دلیل میتوانند سریعتر و دقیقتر چرخانده شوند. اسکنرهای سه بعدی لیزری زمان پرواز معمول میتوانند در ثانیه فاصلهی ۱۰ تا ۱۰۰ هزار نقطه را محاسبه کنند.
۲.۲. مثلثسازی (Triangulation)
اسکنر سه بعدی لیزری که بر پایهی مثلثسازی عمل میکنند هم گونهای از اسکنرهای سه بعدی فعال است که از نور لیزر برای برای موقعیتیابی نقاط روی سطح لیزر استفاده میکند. این گونه از اسکنرهای سه بعدی یک اشعه لیزر را بر روی سطح جسم میتاباند. سپس از یک دوربین برای ثبت موقعیت نقاط لیزر استفاده میکند. متناسب با فاصلهای که اشعهی لیزر بر روی سطح جسم میتابد، نقاط لیزر در مکانهای متفاوتی از میدان دید دوربین قرار میگیرند. این روش به این خاطر مثلثسازی نامیده میشود که در آن هر نقطه از لیزر، دوربین و تاباننده لیزر یک مثلث را تشکیل میدهند.
یکی از اضلاع این مثلث، یعنی فاصلهی تابانندهی لیزر و دوربین ثابت و مشخص است. زاویهی ایجاد شده توسط تابانندهی لیزر مشخص است. زاویهی ایجاد شده توسط دوربین هم برای هر نقطه مشخص است. این سه عدد میتوانند شکل و اندازههای مثلث ایجاد شده و در نتیجه موقعیت فضایی هرکدام از نقاط مورد اسکن سه بعدی را به ما بدهند.
در اغلب موارد به جای استفاده از لیزر تک نقطهای از لیزر نواری استفاده میشود تا بتوان سرعت فرآیند جاروب کردن کل سطح جسم توسط لیزر و در نتیجه سرعت فرآیند اسکن سه بعدی را بالا برد. شورای ملی پژوهش کانادا یکی از اولین انستیتوهایی بود که در سال ۱۹۷۸ به توسعهی تکنولوژی اسکنر سه بعدی لیزری با کمک مثلثسازی پرداخت.
نقاط ضعف و قدرت اسکنر سه بعدی لیزری – زمان پرواز و مثلثسازی
هرکدام از اسکنرهای سه بعدی لیزری زمان پرواز و مثلثسازی نقاط ضعف و قدرت مختص به خود را دارند. در نتیجه هر یک از آنها را برای کاربردهای خاصی مناسب هستند.
نقاط قوت اسکنر سه بعدی لیزری زمان پرواز
مزیت اسکنر سه بعدی لیزری زمان پرواز این است که میتواند برای فاصلههای زیاد، در مقیاس کیلومتر، کار کند. بنابراین این اسکنر سه بعدی لیزری برای اسکن سه بعدی ساختمانها و پدیدههای جغرافیایی مناسب است.
نقاط ضعف اسکنر سه بعدی لیزری زمان پرواز
عیب اسکنر سه بعدی لیزری زمان پرواز در دقت آن است. به خاطر این که سرعت نور بسیار بالا است و در نتیجه محاسبهی زمان رفت و برگشت آن، خصوصاً در فاصلههای میلیمتری، دشوار است، اسکنر سه بعدی لیزری زمان پرواز در فاصلههای کم، از دقت نه چندان خوبی برخوردار است.
یک اسکنر سه بعدی لیزری زمان پرواز زمانی که به لبههای یک جسم میرسد ممکن است دقتش را از دست دهد. این اختلال به این خاطر است که با فرستادن تنها یک پالس لیزر، اطلاعات موقعیت از دو مکان به اسکنر سه بعدی باز میگردد. اسکنر برای به دست آوردن موقعیت مکانی مورد نظر، میانگین اطلاعات مکانی دو نقطه را در نظر میگیرد و در نتیجه خروجی آن مشمول خطا میشود. وقتی از رزولوشن بالا برای اسکن سه بعدی با کمک یک اسکنر سه بعدی لیزری زمان پرواز استفاده میشود، شانس برخورد اشعه لیزر به نقاط روی لبهی جسم افزایش مییابد.
استفاده از شعاع لیزر کمتر
یک روش دیگر برای حل این مشکل استفاده از اسکنرهایی با شعاع لیزر کمتر است. ولی استفاده از این اسکنرهای سه بعدی هم محدودیتهای خودش را دارد و آن هم توانای طی مسافت کمتر توسط اشعهی لیزر در این اسکنرهای سه بعدی است.
نرمافزارهای تحلیل دادههای یک اسکنر سه بعدی لیزری زمان پرواز هم میتواند در حل مشکل دقت کم آن در اسکن سه بعدی لبههای یک جسم کمک کند. این نرمافزارها میتوانند با تعیین نقطهی اول برخوردکننده با لیزر و حذف نقطهی دوم از روند تحلیل به یک خروجی دقیق دست یابند.
برای یک اسکنر سه بعدی لیزری زمان پرواز که توانایی ۱۰ هزار مرتبه تحلیل موقعیت مکانی یک نقطه از جسم در هر ثانیه دارا است، اسکن سه بعدی با رزولوشن پایین میتواند کمتر از یک ثانیه طول بکشد. ولی برای اسکن سه بعدی با رزولوشن بالا، که نیاز به میلیونها مرتبه تحلیل موقعیت مکانی یک نقطه از جسم را دارد، میتواند روند اسکن سه بعدی چند دقیقه زمان ببرد.
ارتعاش دشمن دقت میشود
مشکل، زمانی به وجود میآید که به خاطر افزایش زمان فرآیند اسکن سه بعدی نقاط، شانس لرزش و جابهجایی زاویهی دید اسکنر سه بعدی افزایش مییابد. تصور کنید که هر نقطه از جسم بارها در زمانهای متفاوت از زوایای دید متفاوتی رصد میشود. این میتواند در تحلیل دادهها توسط اسکنر سه بعدی اختلال ایجاد کند. به همین خاطر بسیار مهم است که از اسکنرهای سه بعدی لیزری زمان پرواز تنها بر روی پایههای ثابت با کمترین میزان ارتعاش استفاده شود. استفاده از این گونه از اسکنرهای سه بعدی در حالت متحرک و بر روی دست بسیار دشوار است.
قوت و ضعف اسکنر سه بعدی لیزری مثلثسازی
موقعیتیابهای مکانی که از روش مثلثسازی استفاده میکنند خواص کاملن وارونهای دارند. یک اسکنر سه بعدی لیزری که از روش مثلثسازی برای اسکن سه بعدی اجسام و محیط استفاده میکند تنها در فاصلههای نزدیک توانایی اسکن سه بعدی اجسام را دارد. همچنین این اسکنرها از دقت نسبی بالایی برخوردار هستند. دقت یک اسکنر سه بعدی لیزری مثلثسازی در حد و اندازهی دهها میکرومتر است.
۳.۲. کونوسکوپیک هولوگرافی (Conoscopic Holography)
در یک سیستم کونوسکوپیک، ابتدا یک اشعهی لیزر به سطح تابانده میشود. سپس بازتاب همان اشعه از یک کریستال مونوسکوپیک گذر داده میشود و بر روی یک CCD تابانده میشود. نتیجه حاصله یک الگوی شکست نور(Diffraction Pattern) است که میتوان با تحلیل فرکانس آن فاصله تا سطح جسم را به دست آورد. مزیت اصلی استفاده از Conoscopic Holography این است که تنها یک مسیر اشعه برای اندازهگیری نیاز است. بنابراین از این روش میتوان در محاسبهی عمق یک سوراخ ایجاد شده توسط دریل استفاده کرد.
۳. اسکنر سه بعدی لیزری دستی (Hand-Held Laser Scanners)
اسکنر سه بعدی دستی لیزری از روش مثلثسازی که در بخش قبل توضیح داده شد برای اسکن سه بعدی استفاده میکند. این اسکنر سه بعدی دستی یک نقطه و یا خطی از لیزر را بر روی یک جسم میتاباند و یک سنسور فاصله را تا سطح جسم اندازه میگیرد. موقعیت نقاط روی جسم بر اساس دستگاه مختصات محلی اسکنر سه بعدی دستی سنجیده میشود. بنابراین برای اسکن سه بعدی در زمانی که اسکنر سه بعدی دستی در حال جابهجایی است باید موقعیت خود اسکنر سه بعدی دستی به دست آید.
موقعیت اسکنر سه بعدی دستی میتواند با استفاده از نقاطی قرار داده شده بر روی جسم مشخص شود. همچنین اسکنر سه بعدی دستی میتواند با مرجع قرار دادن نقاط موجود در محیط اسکن به موقعیت خودش پی ببرد. در هردو روش موقعیتیابی خود اسکنر سه بعدی دستی، از دیودهای تابانندهی نور مادون قرمز که بر روی اسکنر نصب شدهاند استفاده میشود.
اطلاعات خروجی از یک اسکنر سه بعدی دستی لیزری به صورت مجموعهای از موقعیت فضایی چندین نقطه ذخیره میشود. با پردازش این نقاط میتوان آنها را به مشهای مثلثسازیشده(Triangulated Mesh) و سپس به مدل CAD تبدیل کرد.
اسکنر سه بعدی دستی لیزری میتواند این اطلاعات را با اطلاعات به دست آمده از سنسورهای نور مرئی منفعل که رنگها و بافت روی سطح جسم را هم ثبت میکند ترکیب کنند و یک مدل کامل سه بعدی دیجیتال را بسازد.
۴. اسکنر سه بعدی نور ساخت یافته (Structured Light)
اسکنرهای سه بعدی نور ساختیافته(Structured Light 3D Scanner) یک الگوی نوری را به جسم میتابانند و سپس تغییرات ناشی از آن الگوی نور را بر سطح جسم بررسی میکنند. این الگوهای نوری از یک تابانندهی السیدی(LCD Projector) یا منابع پایدار نوری دیگر تابانده میشود. یک دوربین، به آرامی از تابانندهی الگوی نوری فاصله میگیرد و شکل الگوی نوری را نظاره میکند و به این ترتیب فاصلهی تمام نقاطی که در میدان دید آن قرار دارند را محاسبه میکند.
اسکن سه بعدی با استفاده از تابش نور ساختیافته از زمینههای به روز و در حال توسعهی حوزهی اسکن سه بعدی است.
مزیت اسکنرهای سه بعدی نور ساختیافته سرعت و دقت آنها است. اسکنر سه بعدی نور ساختیافته میتواند به جای اسکن سه بعدی یک نقطه در لحظه، چندین نقطه و یا حتی همهی یک میدان دید را در یک زمان اسکن سه بعدی کند. اسکن سه بعدی تمام یک میدان دید در یک لحظه موجب میشود که زمان فرآیند اسکن سه بعدی به حداقل برسد و در نتیجه شانس ایجاد ارتعاش و لرزش در اسکنر سه بعدی کمینه میشود. هرچند بعضی از اسکنرهای سه بعدی موجود توانایی اسکن سه بعدی اجسام در حال حرکت را به صورت درلحظه(Real Time) دارند.
۵. اسکنر سه بعدی نور مدولاسیون شونده (Modulated Light)
اسکنر سه بعدی نور مدولاسیونشونده(Modulated Light 3D Scanner) یک نور متغیر را به طور پیوسته بر روی جسم میتاباند. اغلب این گونه از اسکنرهای سه بعدی یک نور تقویتشدهی سینوسی را بر روی جسم میتابانند.
۶. روشهای اسکن سه بعدی حجمی (Volumetric Techniques)
۱.۶. اسکن حجمی در پزشکی (Medical)
توموگرافی کامپیوتری (Computed Tomography) یا CT یک روش تصویربرداری پزشکی است با استفاده از تعداد زیادی از عکسهای دوبعدی X-ray یک تصویر سه بعدی از درون جسم میسازد. به طور مشابه تصویربرداری رزونانس مغناطیسی(Magnetic Resonance Imaging) هم یکی دیگر از تکنیکهای تصویربرداری پزشکی و اسکن سه بعدی حجمی است که کنتراست بیشتری را بین اعضای نرم بدن در مقایسه با روش CT ایجاد میکند. این تکنیکهای اسکن سه بعدی حجمی یک خروجی لایهبهلایه حجمی و سه بعدی را ایجاد میکنند. اینم خروجی میتواند به طور مستقیم دیده و بررسی شود. همچنین خروجی تکنیکهای اسکن سه بعدی حجمی میتواند با استفاده از الگوریتمهای استخراج همصفحهای(Isosurface Extraction Algorithm) به سطوح عادی استخراج شده از روشهای متداول اسکن سه بعدی سطحی تبدیل شوند.
۲.۶. اسکن حجمی در صنعت (Industrial)
در صنعت هم برای انجام تستهای غیرمخرب، مهندسی معکوس، مطالعات بیولوژیک و نمونههای دیرینهشناسی از روشهای اسکن سه بعدی حجمی، همچون توموگرافی کامپیوتری صنعتی، میکروتوموگرافی و MRI، استفاده میکنند.
۷. اسکنرهای سه بعدی غیرتماسی منفعل (Non-Contact Passive)
اسکنرهای سه بعدی منفعل از خود اشعهای بر سطح جسم ساطع نمیکنند. یک اسکنر سه بعدی منفعل با دریافت نورهای محیطی بازتاب شده از سطح یک جسم به تحلیل شکل آن میپردازد. اغلب اسکنرهای سه بعدی منفعل با تحلیل بازتاب نور مریی به شکل سطح جسم دست پیدا میکنند. ولی برخی از آنها در محدودهی نور مادون قرمز هم میتوانند عمل کنند.
یک اسکنر سه بعدی منفعل میتواند بسیار ارزان باشد. این اسکنر در اغلب موارد میتواند با یک یا چند دوربین ساده اسکن سه بعدی را انجام دهد.
- سیستمهای اسکن سه بعدی استریوسکوپیک(Stereoscopic Systems)همیشه از دو دوربین مجزا استفاده میکنند که هردوی آنها در هر لحظه یک نقطه را مینگرند. با آنالیز تفاوت گرفته شده از هر کدام از این دو دوربین، میتوان فاصلهی هر نقطه را محاسبه کرد. این روش بر مبنای بینایی استریوسکوپیک انسان(Stereoscopic Vision) استوار است.
- سیستمهای فوتومتریک(Photometric Systems) اغلب از یک دوربین استفاده میکنند. هرچند که یک سیستم فوتومتریک برای اسکن سه بعدی یک جسم و یا یک محیط، بارها به تصویربرداری آن در شرایط نوری متفاوت و زوایای مختلف میپردازد.
- تکنیکهای اسکن سه بعدی شبح(Silhouette) از خطوط خارجی تعداد زیادی عکس استفاده میکنند. در این عکسها باید کنتراست خوبی بین جسم و پسزمینهی آن رعایت شده باشد. روشهای اسکن سه بعدی شبح برای ایجاد یک بدنه بصری(Visual Hull) تقریبی از یک جسم سه بعدی مناسب است. هرچند با استفاده از این روش بعضی از تقعرهای جسم(مانند درون یک کاسه) نمیتوانند اسکن شوند.
۸. تقسیمبندی اسکنرهای سه بعدی از نظر ابعاد قابل اسکن
اسکنرهای غیرتماسی
اسکنرهای غیرتماسی را هم میتوان از دیدگاه ابعاد اجسامی که اسکن سه بعدی میکنند به دو دستهی کلی اسکنرهای کوچک-مقیاس(Short Range) و اسکنرهای متوسط/بزرگ-مقیاس(Medium/Long Range) دستهبندی کرد. همانطور که از نام این دو دسته پیداست اولی به اسکنرهایی گفته میشود که توانایی اسکن اجسام کوچک را دارند و دومی به اسکنرهایی که توانایی اسکن اجسام متوسط/بزرگ را دارند.
اسکنرهای کوچک-مقیاس
این دسته از اسکنرهای سه بعدی به طور معمول از روشهای مثلثسازی لیزری(Laser Triangulation) و تکنولوژی نور ساختیافته(Structured Light Technology) استفاده میکنند.
اسکنرهای بر پایه لیزر
اسکنرهای بر پایه لیزر از پروسهای استفاده میکنند که Trigonometric Triangulation نام دارد و برای ثبت اجسام سه بعدی به صورت میلیونها نقطه استفاده میشود. اسکنرهای لیزری یک یا چند خط لیزر را بر جسم میتابانند و سپس بازتاب آن را با یک یا چند سنسور دریافت میکنند. سنسورها در فاصلهای معلوم از منابع لیزر قرار دارند. با محاسبهی زاویهی بازتاب نور لیزر، محل نقاط به طور دقیق اندازهگیری میشود.
اسکنرهای لیزری به شکلهای دستی و قابل حمل، دارای بازوی مکانیکی(Arm Based)، بر اساس CMM یا CMM Based، ردیاب برد بلند یک نقطه(Single Point Long Range Trackers) و حتی بزرگ-مقیاس وجود دارند.
مزایای اسکنر سه بعدی لیزری
- توانایی اسکن سطوح دشوار همچون سطوح براق
- حساسیت کمتر به تغییرات وضعیت نور محیط
- به نسبت دیگر اسکنرهای سه بعدی، این اسکنرها راحتتر میتوانند به عنوان اسکنر قابل حمل استفاده شوند
- طراحی سادهتر – استفادهی آسانتر و هزینهی کمتر
اسکنر سه بعدی با نور ساختیافته
این دسته از اسکنرها که با نام اسکنرهای سه بعدی نور سفید هم شناخته میشوند، امروزه اغلب از نورهای ساختیافتهی LED آبی و سفید استفاده میکنند. این اسکنرها یک الگوی نوری را بر جسم میتابانند. این الگوی نوری شامل نوارها، بلاکها و شکلهای دیگر است. این اسکنرهای سه بعدی دارای یک یا چند سنسور هستند که به لبههای این الگوها و شکلهای ساختیافته نگاه میکنند تا شکل سه بعدی جسم مورد نظر را به دست آورند.
مشابه اسکنرهای لیزری، اسکنرهای با نور ساختیافته هم پروسهی Trigonometric Triangulation را با معلوم بودن فاصلهی سنسورها از منبع نور به کار میگیرند. اسکنرهای سه بعدی با نور ساختیافته میتوانند بر روی سه پایه قرار گیرند و یا به طور دستی حمل شوند.
مزایای اسکنرهای سه بعدی با نور ساختیافته
- اسکن بسیار سریع – ۲ ثانیه برای هر اسکن
- سطح وسیع اسکن – ۴۸ اینچ در یک اسکن
- تفکیکپذیری بالا – ۱۶ میلیون نقطه در هر اسکن و فاصلهی نقاط ۱۶ میکرون
- دقت بسیار بالا – ۱۰ میکرون
- تطبیقپذیر – لنزهای چندگانه برای اسکن اجسام کوچک و بزرگ در یک سیستم
- قابل حمل
- بیضرر برای چشم – در اسکن انسان و حیوان
- قیمتهای متفاوت – متناسب با تفکیکپذیری و دقت
اسکنرهای سه بعدی متوسط/بزرگ-مقیاس
اسکنرهای سه بعدی بزرگ مقیاس به دو فرم اصلی دستهبندی میشوند؛ پالس-محور و تغییر-فاز-محور.
هر دو روش برای اسکن سه بعدی اجسام بزرگ مانند ساختمانها، سازههای معماری، هواپیما و ماشینآلات نظامی مناسب هستند. البته اسکنرهای سه بعدی تغییر-فاز-محور برای اجسامی با اندازهی متوسط همچون اتومبیلها، پمپهای بزرگ و تجهیزات صنعتی هم کارایی بسیار خوبی دارد.
اسکنر سه بعدی لیزری پالس-محور (Laser Pulse-Based 3D Scanners)
اسکنرهای سه بعدی لیزری پالس-محور که به عنوان اسکنرهای زمان پرواز(Time-of-Flight) هم شناخته میشوند، بر اساس یک مفهوم بسیار ساده شکل گرفتهاند؛ سرعت نور به طور بسیار دقیقی معلوم است. بنابراین، اگر طول زمانی که یک پالس لیزر برای رسیدن به یک جسم و بازتاب از سطح آن صرف میکند مشخص باشد، فاصلهی سنسور تا جسم معین میگردد. این اسکنرها میلیونها پالس لیزر را با دقت زمانی پیکوثانیه میفرستند و دریافت میکنند. با دوران لیزر و سنسور (معمولاً به وسیله یک آینه)، اسکنر میتواند حتی تا ۳۶۰ درجه را در پیرامون خودش اسکن نماید.
اسکنر سه بعدی لیزری تغییر-فاز-محور(Laser Phase Shift 3D Scanner)
اسکنرهای سه بعدی تغییر-فاز-محور دستهای دیگر از اسکنرهای زمان پرواز هستند و به طور مفهومی همانند اسکنرهای پالس-محور عمل میکنند. این اسکنرها یک پالس لیزر را با فاز معین میفرستند و دریافت میکنند. سپس به مقایسهی فاز لیزر خروجی و ورودی میپردازند و با مشخص کردن تغییر فاز ایجاد شده، فاصلهی سنسور و جسم را محاسبه میکنند. اندازهگیری با استفاده از روش تغییر-فاز-محور به طور معمول دقیقتر است، ولی برای اسکن اجسام بزرگ، این روش از انعطافپذیری کمتری نسبت به روش پالس-محور برخوردار است. اسکنرهای سه بعدی پالس-محور میتوانند اجسامی با ابعادی تا ۱۰۰۰ متر را اسکن نمایند، در حالی که اسکنرهای تغییر-فاز-محور برای اجسامی با ابعاد حداکثر ۳۰۰ متر مناسبتر هستند.
مزایای اسکنرهای سه بعدی بزرگ-مقیاس
- اسکن سه بعدی میلیونها نقطه در یک مرتبهی اسکن – حداکثر یک میلیون نقطه در ثانیه
- محدوده وسیع اسکن – حداکثر تا ۱۰۰۰ متر
- دقت و تفکیکپذیری خوب – متناسب با اندازهی جسم
- اسکن غیرتماسی – ایمن برای همهی اجسام
- قابل حمل





دیدگاه کاربران
بسیار عالی بود. سپاس